
基于旋變反饋的受擾擺動閥脈沖器滑模跟蹤控制
中文題目:基于旋變反饋的受擾擺動閥脈沖器滑模跟蹤控制
論文題目:Resolver to digital conversion-based sliding mode tracking control for oscillating valve pulser with disturbances
錄用期刊/會議:Journal of vibration and control (中科院大類3區(qū))
錄用時間:2025年3月29日
作者列表:
1) 王新鵬 中國石油大學(xué)(北京)人工智能學(xué)院 新一代電子信息技術(shù) 碩21
2) 劉得軍 中國石油大學(xué)(北京)人工智能學(xué)院 電子系教授
3) 陳曉暉 中國石化石油工程技術(shù)研究院有限公司
4) 楊書博 中國石化石油工程技術(shù)研究院有限公司
5) 張良臣 中國石化石油工程技術(shù)研究院有限公司
摘要:
研究了泥漿連續(xù)波傳輸過程中使用的擺動閥脈沖器的控制問題。構(gòu)造了一種固定時間收斂的動態(tài)方程,在雙環(huán)架構(gòu)下提出了一種旋變傳感器的角度估計方法,利用該方法得到轉(zhuǎn)子狀態(tài)信息并將其反饋至控制器和觀測器中使用;證明了約束收斂時間、角度估計精度及整體閉環(huán)系統(tǒng)的穩(wěn)定性;通過幾種不同的角度估計方法的比較說明了所提方法的性能,最后通過兩組高頻調(diào)制軌跡的集成跟蹤測試,證實了其能夠產(chǎn)生清晰的泥漿壓力信號。
背景與動機:
為實時了解井下工況、儀器狀態(tài)和地層信息,需要獲取大量的數(shù)據(jù),連續(xù)波傳輸技術(shù)是實現(xiàn)高速數(shù)據(jù)傳輸?shù)闹匾侄沃弧τ谛D(zhuǎn)閥脈沖器和擺動閥脈沖器,前者需要對轉(zhuǎn)子的轉(zhuǎn)速進(jìn)行控制,而后者需要對轉(zhuǎn)子位置進(jìn)行控制,相關(guān)研究多集中在旋轉(zhuǎn)閥脈沖器的轉(zhuǎn)速控制上,關(guān)于擺動閥脈沖器的位置控制研究鮮有報道。轉(zhuǎn)子在進(jìn)行高頻振蕩時會引起周期性的和非衰減性擾動,由此將導(dǎo)致控制精度的損失,此外,由于使用成本和高溫環(huán)境壓力,使用基于硬件的RDC方法給OVP系統(tǒng)帶來了挑戰(zhàn),而基于軟件的RDC方法,不同的解調(diào)和角度估計方法將導(dǎo)致不同的解算精度,而解算精度將直接影響控制系統(tǒng)的性能。
主要內(nèi)容:
基于固定時間收斂方程設(shè)計了一種旋變傳感器的角度估計方法,通過RDC所獲取的角度和轉(zhuǎn)速被用于控制器和觀測器中使用,控制器和觀測器基于super-twisting滑模和有限時間擾動觀測器進(jìn)行設(shè)計,有效抑制了參數(shù)不確定和高頻水力轉(zhuǎn)矩干擾所帶來的影響,最后以RDC提供的角度和轉(zhuǎn)速在高頻擾動情況下進(jìn)行了兩條調(diào)制軌跡的跟蹤測試,結(jié)果表明誤差能夠在有限時間收斂至平衡點附近的微小鄰域內(nèi)。
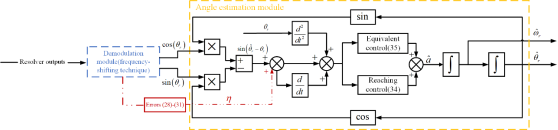
圖1 旋變解碼流程
圖1表示旋變的輸出首先經(jīng)過解調(diào)模塊得到帶有解調(diào)誤差的包絡(luò)信號,隨后送入角度估計模塊,通過角度估計得到實際的轉(zhuǎn)子角度和轉(zhuǎn)速。
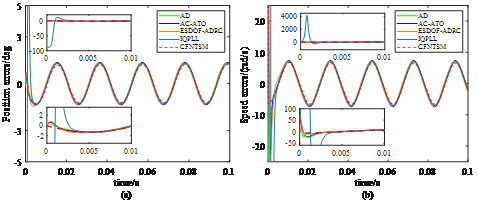
圖2 角度估計方法的比較
脈沖發(fā)生器的轉(zhuǎn)子需要頻繁地啟停,因此在實際應(yīng)用中要求超調(diào)量盡可能小且響應(yīng)快。圖2表明CFNTSM具有更高的跟蹤精度和響應(yīng)速度,誤差在有限時間內(nèi)收斂到平衡點的小鄰域內(nèi),且該方法能夠保證RDC系統(tǒng)的穩(wěn)定性。控制器綜合設(shè)計為:
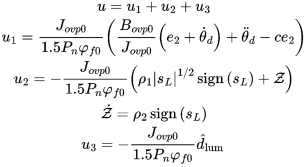
該控制結(jié)構(gòu)可以使OVP系統(tǒng)在干擾下的跟蹤誤差快速收斂到平衡點的小鄰域內(nèi),并保證電流內(nèi)環(huán)參考信號抖振的有效減弱。
(a)
(b)
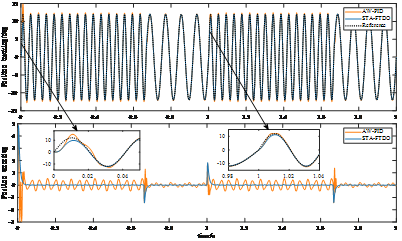
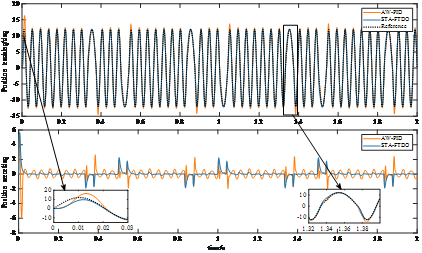
圖3軌跡跟蹤結(jié)果 (a) FSK軌跡 (b) PSK軌跡
圖3表明在初始階段和頻率或相位變化時刻,STA-FTDO能夠迅速符合期望軌跡,超調(diào)量小且保持最小的瞬態(tài)誤差。即使存在高頻干擾,STA-FTDO能夠在兩種不同的軌跡上保持最小的跟蹤誤差。在RDC反饋下,轉(zhuǎn)子能夠以較小的誤差執(zhí)行啟停、頻率切換、相位切換等調(diào)制命令,保證了轉(zhuǎn)子在參數(shù)不確定和水力轉(zhuǎn)矩擾動的情況下準(zhǔn)確地跟蹤兩條理想的振蕩軌跡,即產(chǎn)生清晰的壓力信號。
結(jié)論:
研究解決了與擺動閥脈沖發(fā)生器相關(guān)的控制挑戰(zhàn)。為此,介紹了一種新的 RDC 角度估計方法,實現(xiàn)了控制系統(tǒng)的雙回路配置。在 RDC 反饋下,采用兩種不同的調(diào)制策略進(jìn)行了軌跡跟蹤測試。結(jié)果表明,該控制方案能夠保持較高的跟蹤精度,在干擾條件下仍能產(chǎn)生連續(xù)的泥漿壓力波動。在未來,擺動閥脈沖器將注重故障重構(gòu)技術(shù)和驅(qū)動電壓的優(yōu)化分配,以適應(yīng)更加具有挑戰(zhàn)性的深地和深海環(huán)境。
作者簡介:
劉得軍,教授,中國石油大學(xué)(北京),人工智能學(xué)院電子信息工程系,博士生導(dǎo)師。研究方向:電磁測量方法與數(shù)值模擬技術(shù)、電纜高速數(shù)據(jù)傳輸理論與技術(shù)、機電測量系統(tǒng)虛擬樣機設(shè)計等。總計發(fā)表科學(xué)論文150余篇。
聯(lián)系方式:Email: liudj65@163.com